TGK 36 Deep Hole CNC Advanced ເຄື່ອງເຈາະແລະເຄື່ອງຂັດ
ລັກສະນະເຄື່ອງຈັກ
TGK25 series CNC skiving & rolling machine tool adopts the processing of fixed workpiece and rotary feed of tool.ເຄື່ອງມືເຄື່ອງຈັກສາມາດຮັບຮູ້ການປຸງແຕ່ງທີ່ຫນ້າເບື່ອ, ການຂູດແລະການມ້ວນຂອງຮູພາຍໃນຂອງ workpieces, ວິທີການປຸງແຕ່ງແມ່ນງ່າຍດາຍ, ແລະຜະລິດຕະພັນທີ່ປຸງແຕ່ງແມ່ນມີຄວາມແມ່ນຍໍາສູງ.ຂໍ້ໄດ້ປຽບຕົ້ນຕໍຂອງເຄື່ອງມືເຄື່ອງຈັກນີ້ແມ່ນປະສິດທິພາບການປຸງແຕ່ງສູງ, ປະສິດທິພາບທີ່ຫມັ້ນຄົງ, ແລະປະສິດທິພາບແມ່ນ 5 ຫາ 10 ເທົ່າຂອງເຄື່ອງເຈາະຂຸມເລິກແບບດັ້ງເດີມແລະເຄື່ອງຈັກ honing;ລະດັບການຄວບຄຸມອັດສະລິຍະແມ່ນສູງ, ແລະການຄວບຄຸມດິຈິຕອນແລະການຕິດຕາມແຕ່ລະຄໍາສັ່ງປະຕິບັດຂອງເຄື່ອງມືເຄື່ອງຈັກແມ່ນງ່າຍດາຍແລະສະດວກ.ງ່າຍທີ່ຈະປະຕິບັດງານ.
ເຄື່ອງມືເຄື່ອງຈັກຊຸດ TGK25 ມີການຕິດຕັ້ງລະບົບຄວບຄຸມຕົວເລກ Siemens 828D;ກ່ອງ spindle ແມ່ນຂັບເຄື່ອນໂດຍ AC servo motor ທີ່ມີລະບຽບການຄວາມໄວ stepless, ແລະ spindle bearing ຮັບຮອງເອົາລູກປືນທີ່ມີຄວາມຖືກຕ້ອງສູງທີ່ມີຄວາມຖືກຕ້ອງຂອງພືດຫມູນວຽນສູງ.ກ່ອງອາຫານຮັບຮອງເອົາມໍເຕີ servo AC ທີ່ມີລະບຽບຄວາມໄວ stepless;ມັນໄດ້ຖືກຕິດຕັ້ງດ້ວຍສະກູບານທີ່ມີຄວາມແມ່ນຍໍາສູງເພື່ອຮັບຮູ້ອາຫານທີ່ມີຄວາມແມ່ນຍໍາສູງແລະຄວາມຫມັ້ນຄົງຂອງກ່ອງ spindle.ເຄື່ອງຂູດແລະມ້ວນ CNC ໄດ້ຖືກຕິດຕັ້ງດ້ວຍເຄື່ອງມືຂູດແລະການຫົດຕົວແບບອັດຕະໂນມັດທີ່ມີປະສິດທິພາບສູງ, ລະບົບການຖອດທໍ່ແລະທໍ່ໄຮໂດຼລິກພິເສດ, ຊິ້ນວຽກຖືກສ້ອມແຊມ, ແລະການບີບອັດພາຍນອກຂອງສອງປາຍຂອງກະບອກແມ່ນໃຊ້ເປັນ. ພື້ນຖານຕໍາແຫນ່ງ.ຂຸມພາຍໃນແມ່ນສໍາເລັດດ້ວຍການຂຸດເຈາະ, ຂູດແລະມ້ວນຫນຶ່ງຄັ້ງ.ອຸປະກອນຄວນຈະບໍ່ພຽງແຕ່ເຫມາະສົມສໍາລັບການນໍາໃຊ້ຫົວຂູດໄຮໂດຼລິກ ECOROOL, ແຕ່ຍັງເຫມາະສົມສໍາລັບການນໍາໃຊ້ຫົວຂູດ pneumatic.ໂຄງການນີ້ແມ່ນໂຄງການ turnkey.ອຸປະກອນນີ້ແມ່ນເຫມາະສົມໂດຍສະເພາະສໍາລັບການປຸງແຕ່ງມະຫາຊົນຂອງທໍ່ໄຮໂດຼລິກຕ່າງໆ, ກະບອກສູບແລະອຸປະກອນທໍ່ທີ່ມີຄວາມແມ່ນຍໍາອື່ນໆ.

ຕົວກໍານົດການເຄື່ອງຈັກ
| NO | ລາຍການ | ລາຍລະອຽດ |
| 1 | ກຳລັງປະມວນຜົນຊ່ວງເສັ້ນຜ່າສູນກາງພາຍໃນ | Φ60-360ມມ |
| 2 | ຊ່ວງຄວາມເລິກຂອງການປະມວນຜົນ | 1000mm-12000m |
| 3 | ຄວາມກວ້າງຂອງເສັ້ນທາງເຄື່ອງຈັກ | 650 ມມ |
| 4 | ຄວາມສູງຂອງສູນກາງ spindle | 450 ມມ |
| 5 | ຄວາມໄວ spindle, ເກຣດ | 60-1000rpm, 4 ເກຍ, stepless |
| 6 | ມໍເຕີຫຼັກ | 45/60/75KW, AC servo motor |
| 7 | ຊ່ວງຄວາມໄວການໃຫ້ອາຫານ | 5-3000mm/ນາທີ ( stepless ) |
| 8 | Carriage ຄວາມໄວການເຄື່ອນຍ້າຍໄວ | 3000/6000mm/ນາທີ |
| 9 | Fixture Clamping Range | Φ120-450mm |
| 10 | ມໍເຕີອາຫານ | 48N.m (ມໍເຕີ Siemens AC servo) |
| 11 | ມໍເຕີລະບົບ Coolant | N=7.5kw 11kw 15kw |
| 13 | ລະດັບຄວາມກົດດັນຂອງລະບົບ Coolant | 2.5MPa |
| 14 | ການໄຫຼຂອງລະບົບ Coolant | 200L/ນາທີ, 200L/ນາທີ, 200L/ນາທີ (3ຊຸດ) |
| 15 | ຄວາມກົດດັນລະດັບລະບົບໄຮໂດຼລິກ | 7 MPa |
| 16 | ຄວາມກົດດັນອາກາດ | ≥0.4MPa |
| 17 | ລະບົບຄວບຄຸມ | Siemens |
| 18 | ການສະຫນອງພະລັງງານ | 380V.50HZ, 3 ໄລຍະ (ປັບແຕ່ງ) |
| 19 | ເຄື່ອງວັດແທກ | L*2400*2100*(L*W*H) |
ຊິ້ນສ່ວນເຄື່ອງຈັກທີ່ສໍາຄັນ

1. ຕຽງເຄື່ອງ
ຕຽງນອນຮັບຮອງເອົາໂຄງສ້າງທາງລົດໄຟຄູ່ມືຮາບພຽງສອງເທົ່າ, ແລະຄວາມກວ້າງຂອງລົດໄຟຄູ່ມືແມ່ນ 650 ມມ.ຮ່າງກາຍຂອງຕຽງນອນແມ່ນອົງປະກອບພື້ນຖານຂອງເຄື່ອງມືເຄື່ອງຈັກ, ແລະຄວາມເຂັ້ມງວດຂອງມັນມີຜົນກະທົບໂດຍກົງຕໍ່ການເຮັດວຽກແລະຄວາມຖືກຕ້ອງຂອງການເຮັດວຽກຂອງເຄື່ອງມືເຄື່ອງຈັກທັງຫມົດ.ດັ່ງນັ້ນ, ຕຽງຂອງເຄື່ອງມືເຄື່ອງຈັກນີ້ແມ່ນ molded ດ້ວຍດິນຊາຍ resin ແລະຫລໍ່ດ້ວຍທາດເຫຼັກສຽງໂຫວດທັງຫມົດທີ່ມີຄຸນນະພາບສູງ HT300.ມັນມີຮູບລັກສະນະທີ່ດີແລະຄວາມເຂັ້ມແຂງ.ຮູບແບບຂອງ ribs ແມ່ນສົມເຫດສົມຜົນ.ດ້ານນອກຂອງຕຽງນອນແມ່ນຫລໍ່ດ້ວຍຮ່ອງ backflow, ແລະການປົກຫຸ້ມຂອງປ້ອງກັນໄດ້ຖືກຕິດຕັ້ງຢູ່ດ້ານນອກ, ເຊິ່ງມີຄຸນສົມບັດປ້ອງກັນຮູບລັກສະນະທີ່ດີແລະບໍ່ມີການຮົ່ວໄຫລຂອງນ້ໍາມັນ.ມັນສາມາດເກັບກໍານ້ໍາຕັດຢ່າງມີປະສິດທິພາບແລະສົ່ງຄືນມັນຮ່ວມກັນສໍາລັບການນໍາໃຊ້ຊ້ໍາຊ້ອນ.ຕຽງນອນ adopts ໂຄງສ້າງ splicing ແຍກ, ແລະ rail ຄູ່ມື adopts quenching ຄວາມຖີ່ລະດັບປານກາງ (ຄວາມແຂງບໍ່ຫນ້ອຍກ່ວາ HRC50, ຄວາມເລິກ hardening ບໍ່ຫນ້ອຍກ່ວາ 3mm) ແລະຫຼັງຈາກນັ້ນຂະບວນການ grinding, ຊຶ່ງເຮັດໃຫ້ເຄື່ອງມືເຄື່ອງມີຄວາມຕ້ານທານພັຍທີ່ດີແລະການຮັກສາຄວາມແມ່ນຍໍາ.
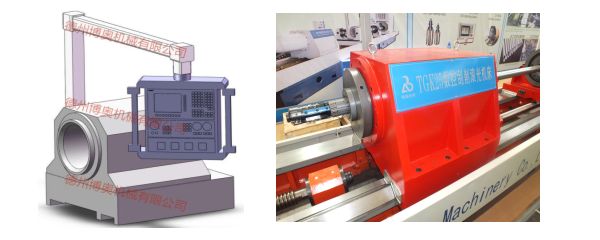
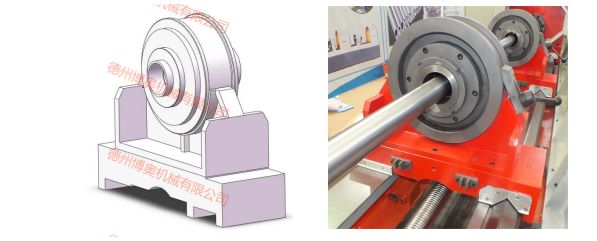
2. Boring Rod Drive Box
ກ່ອງແຖບທີ່ຫນ້າເບື່ອແມ່ນໂຄງປະກອບການຫລໍ່ແບບປະສົມປະສານແລະຖືກຕິດຕັ້ງຢູ່ໃນກະດານອາຫານ.spindle ແມ່ນຂັບເຄື່ອນໂດຍ 45KW AC servo motor, ແລະການຫມຸນ spindle ແມ່ນຂັບເຄື່ອນໂດຍສາຍແອວ synchronous ຂັບເຄື່ອນໂດຍກົນໄກການປ່ຽນແປງຄວາມໄວ.ລະດັບຄວາມໄວແມ່ນ 3-1000r / min, 4 ເກຍ, ບົບໄຮໂດຼລິກອັດຕະໂນມັດການປ່ຽນແປງ stepless ຄວາມໄວລະບຽບການ.ທາງເລືອກຂອງຄວາມໄວການຫມູນວຽນສາມາດໄດ້ຮັບການກໍານົດຕາມປັດໄຈເຊັ່ນ: ອຸປະກອນການ workpiece, ຄວາມແຂງ, ເຄື່ອງມືການຕັດແລະສະພາບການແຕກ chip.ອີງຕາມຄວາມໄວທີ່ແຕກຕ່າງກັນ, ມັນສາມາດຖືກກໍານົດໂດຍຜ່ານການຂຽນໂປລແກລມຂອງລະບົບຄວບຄຸມຕົວເລກ, ແລະລູກປືນ spindle ຖືກເລືອກຈາກຍີ່ຫໍ້ນໍາເຂົ້າເຊັ່ນ N SK ໃນປະເທດຍີ່ປຸ່ນ.ຫນ້າທີ່ຕົ້ນຕໍຂອງກ່ອງແຖບທີ່ຫນ້າເບື່ອແມ່ນການຂັບລົດເຄື່ອງມືທີ່ຈະຫມຸນ

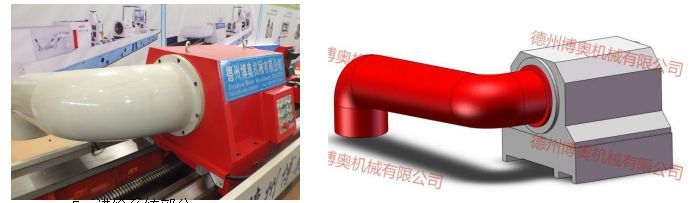
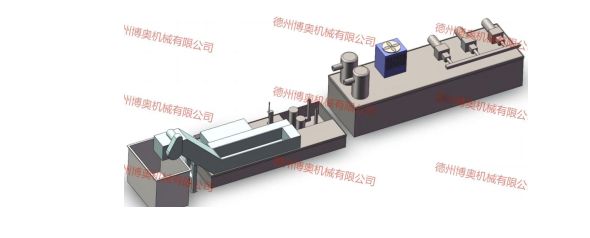
3. ລະບົບການປ້ອນນໍ້າມັນ
ຕັ້ງຢູ່ໃນກາງຂອງເຄື່ອງມືເຄື່ອງຈັກ.ໜ້າທີ່ຫຼັກຂອງພາກສ່ວນຮັບນ້ຳມັນແມ່ນ: 1. ປ້ອນນ້ຳເຢັນໃສ່ເຄື່ອງເຮັດ.ອັນທີສອງ, ສະຫນັບສະຫນູນແຖບເຈາະເພື່ອຫຼຸດຜ່ອນການສັ່ນສະເທືອນຂອງແຖບເຄື່ອງມືໃນລະຫວ່າງການປຸງແຕ່ງ.ອັນທີສາມ, ດ້ານຫນ້າຂອງ oiler ໄດ້ຖືກຕິດຕັ້ງດ້ວຍແຂນຄູ່ມືເຄື່ອງມືກ່ຽວກັບແຜ່ນດ້ານເທິງຂອງ workpiece ໄດ້, ເຊິ່ງສາມາດຮັບຮູ້ຄູ່ມືທາງເຂົ້າໃນເວລາທີ່ເຄື່ອງມືຂູດໄດ້ຖືກປຸງແຕ່ງ.ສີ່, ຫຼັງຈາກເຄື່ອງຮັບນ້ໍາມັນຖືກຕັ້ງຢູ່ເທິງຮ່າງກາຍຂອງຕຽງນອນ, ມັນກົດຊິ້ນວຽກດ້ວຍລະບົບໄຮໂດຼລິກໂດຍຜ່ານອຸປະກອນການສົ່ງຄືນນ້ໍາມັນ, ແລະຮ່ວມກັນມີບົດບາດໃນການກົດແລະປະທັບຕາດ້ານທ້າຍຂອງ workpiece ແລະຈຸດສູນກາງຂອງຕົນເອງ.ແຂນຄູ່ມືແລະໂກນແມ່ນຕ້ອງການໃຫ້ແຂງ, ແລະຄວາມແຂງແມ່ນຕ້ອງການສູງກວ່າ HRC45.
4. ລະບົບເກັບນ້ຳມັນ
ຕັ້ງຢູ່ປາຍຊ້າຍຂອງເຄື່ອງມືເຄື່ອງຈັກ, ມັນສາມາດເຄື່ອນຍ້າຍໄປຕາມທິດທາງ axial ຂອງຮ່າງກາຍຂອງຕຽງນອນແລະຖືກແກ້ໄຂໃນຕໍາແຫນ່ງ.ຫນ້າທີ່ຕົ້ນຕໍຂອງອຸປະກອນການກັບຄືນນ້ໍາມັນແມ່ນ: ໃບຫນ້າສຸດທ້າຍຖືກກົດດັນກັບ workpiece ເພື່ອຮັບຮູ້ເຖິງສູນກາງຂອງ workpiece ປຸງແຕ່ງແລະໃບຫນ້າສຸດທ້າຍປະທັບຕາ coolant ເພື່ອປ້ອງກັນບໍ່ໃຫ້ນ້ໍາຕັດຈາກການ splashing;ນອກຈາກນັ້ນ, ນ້ໍາຕັດແມ່ນຫໍ່ດ້ວຍຊິບໃນລະຫວ່າງການຂະບວນການເຄື່ອງຈັກ, ແລະຜ່ານຮູພາຍໃນຂອງອຸປະກອນການສົ່ງຄືນນ້ໍາມັນໂດຍຜ່ານທໍ່ປ່ອຍຊິບໄຫຼເຂົ້າໄປໃນລໍາລຽງຊິບອັດຕະໂນມັດ.ພາກສ່ວນຕ່ໍາຂອງຮ່າງກາຍກັບຄືນນ້ໍາມັນແມ່ນເຊື່ອມຕໍ່ກັບສະກູ T-shaped ຢູ່ເຄິ່ງກາງຂອງຮ່າງກາຍຕຽງ, ແລະການເຄື່ອນໄຫວ axial ຮັບຮູ້ຕໍາແຫນ່ງທາງສ່ວນຫນ້າຂອງ workpiece ໃນລະຫວ່າງການປະມວນຜົນ;ມັນໄດ້ຖືກຕິດຕັ້ງດ້ວຍອຸປະກອນ servo motor jacking (ເນື່ອງຈາກວ່າ jacking ຮັບຮອງເອົາ servo motor jacking ກ້າວຫນ້າທາງດ້ານທີ່ສຸດ, ເຊິ່ງທົດແທນວິທີການ jacking ໄຮໂດຼລິກເຮັດໃຫ້ການປັບຕົວຂອງແຮງດັນ jacking ເພື່ອຮັບຮູ້ການຄວບຄຸມດິຈິຕອນຢ່າງແທ້ຈິງ. ຄວາມຫນາຂອງກໍາແພງແລະເສັ້ນຜ່າກາງຂອງ workpiece ແມ່ນ. ທີ່ແຕກຕ່າງກັນ, ແລະກໍາລັງ jacking ທີ່ແຕກຕ່າງກັນໄດ້ຖືກຄັດເລືອກເພື່ອປ້ອງກັນບໍ່ໃຫ້ nozzle ຈາກການຜິດປົກກະຕິເຖິງຂອບເຂດຈໍາກັດສູງສຸດ. ), ເພື່ອຮັບຮູ້ຈຸດສູນກາງແລະການຜະນຶກຂອງ workpiece ປຸງແຕ່ງ, ຄວາມແຂງຂອງແຜ່ນ cone ແມ່ນຈໍາເປັນຕ້ອງໄດ້ຂ້າງເທິງ HRC45, ແລະ coaxiality ລະຫວ່າງການ. ແຜ່ນດ້ານເທິງແລະແຜ່ນດ້ານເທິງດ້ານຫນ້າຢູ່ໃນບ່ອນນັ່ງກົດແມ່ນຫນ້ອຍກວ່າ 0.05 ມມ.
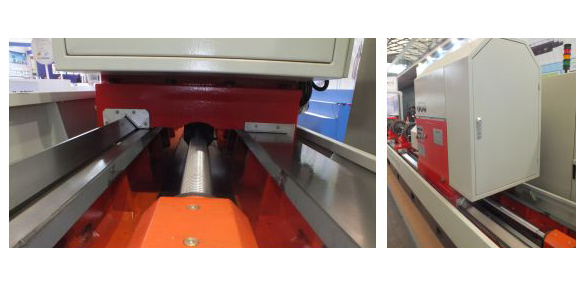
4. ລະບົບອາຫານເຄື່ອງຈັກ
ຄູ່ສະກູບານທີ່ມີຄວາມແມ່ນຍໍາສູງຂອງໄຕ້ຫວັນ Shangyin ຖືກຕິດຕັ້ງຢູ່ເຄິ່ງກາງແລະດ້ານຫລັງຂອງຮ່ອງຂອງຮ່າງກາຍຂອງເຄື່ອງມືເຄື່ອງຈັກ, ແລະມີກ່ອງອາຫານຢູ່ໃນຕອນທ້າຍຂອງ, ຂັບເຄື່ອນດ້ວຍມໍເຕີ AC servo 5.5KW, ເພື່ອຮັບຮູ້ການໃຫ້ອາຫານ. ເຄື່ອງມືໂດຍ pallet ຂອງອາຫານ (ປ່ອງແຖບຫນ້າເບື່ອ).ຄວາມໄວຂອງອາຫານສາມາດປັບໄດ້ຢ່າງບໍ່ຢຸດຢັ້ງ, ແລະເຄື່ອງມືສາມາດຖອດອອກໄດ້ໄວ.ເຄິ່ງທາງຫນ້າຂອງຮ່ອງຂອງຮ່າງກາຍຂອງຕຽງເຄື່ອງໄດ້ຖືກຕິດຕັ້ງດ້ວຍສະກູຮູບ T ແລະກ່ອງອາຫານ, ເຊິ່ງຖືກນໍາໃຊ້ສໍາລັບການໃຫ້ອາຫານອຸປະກອນການກັບຄືນນ້ໍາມັນ, ປັບຕໍາແຫນ່ງ workpiece ແລະ clamping.ລະບົບການໃຫ້ອາຫານທັງຫມົດມີຄວາມໄດ້ປຽບຂອງຄວາມແມ່ນຍໍາສູງ, rigidity ດີ, ການເຄື່ອນໄຫວກ້ຽງ, ແລະການຮັກສາຄວາມແມ່ນຍໍາທີ່ດີ.
5. ລະບົບສະຫນັບສະຫນູນແຖບເຈາະ
ແຂນສະຫນັບສະຫນູນຂອງແຖບເຈາະໄດ້ຖືກສ້ອມແຊມຢູ່ໃນຮ່າງກາຍຂອງວົງເລັບດ້ວຍ screws, ແລະຖືກແທນທີ່ພ້ອມກັບແຖບເຈາະ, ເຊິ່ງສະດວກແລະລວດໄວເພື່ອທົດແທນແຖບເຈາະທີ່ແຕກຕ່າງກັນ.ມັນສ່ວນໃຫຍ່ແມ່ນມີບົດບາດໃນການສະຫນັບສະຫນູນແຖບເຈາະ, ການຄວບຄຸມທິດທາງການເຄື່ອນຍ້າຍຂອງແຖບເຈາະ, ແລະການດູດຊຶມການສັ່ນສະເທືອນຂອງແຖບເຈາະ.ແຂນສະຫນັບສະຫນູນພາຍໃນທີ່ມີຫນ້າທີ່ຫມຸນ.
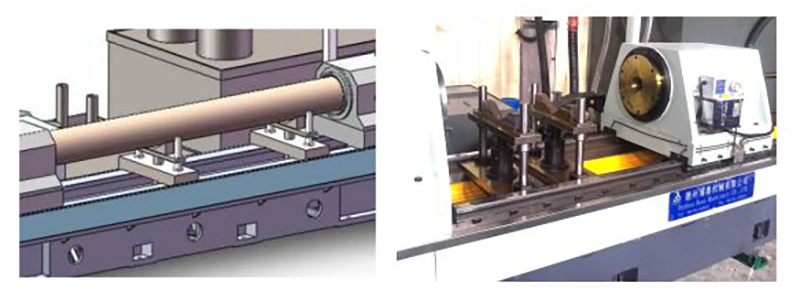
6. Workpiece Fixture ລະບົບສະຫນັບສະຫນູນ
ປະກອບດ້ວຍສອງຊຸດຂອງວົງເລັບ V-shaped ເພື່ອສະຫນັບສະຫນູນ workpiece ໄດ້.ການຍົກສະກູແລະຫມາກແຫ້ງເປືອກແຂງສາມາດປັບໄດ້ຕາມຄວາມຕ້ອງການຕາມເສັ້ນຜ່າສູນກາງ workpiece ທີ່ແຕກຕ່າງກັນ.ມັນສ່ວນຫຼາຍແມ່ນມີບົດບາດໃນການຮັບມືແລະປັບຕົວຂອງ workpiece ແລະຕໍາແຫນ່ງຂອງຂຸມເຈາະ.
7. ລະບົບໄຮໂດຼລິກ
ເຄື່ອງມືເຄື່ອງຈັກໄດ້ຖືກຕິດຕັ້ງດ້ວຍລະບົບໄຮໂດຼລິກພິເສດ, ເຊິ່ງຖືກນໍາໃຊ້ເພື່ອຄວບຄຸມການຂະຫຍາຍແລະການຫົດຕົວຂອງເຄື່ອງມືໄຮໂດຼລິກແລະການຫັນປ່ຽນອັດຕະໂນມັດໄຮໂດຼລິກຂອງກ່ອງແຖບເຈາະເພື່ອເຮັດສໍາເລັດລະບົບການຄວບຄຸມຂອງການປະຕິບັດມ້ວນ.ຄວາມກົດດັນທີ່ຖືກຈັດອັນດັບແມ່ນ 7Mpa.ອົງປະກອບຕົ້ນຕໍແມ່ນຜະລິດຕະພັນຊຸດການຄົ້ນຄວ້ານ້ໍາມັນນໍາເຂົ້າ.
8. ລະບົບກອງນໍ້າເຢັນ
ລະບົບກຳຈັດຊິບລະບາຍຄວາມຮ້ອນ ແລະ ການກັ່ນຕອງ: ສ່ວນຫຼາຍແມ່ນຕັ້ງຢູ່ດ້ານຫຼັງຂອງເຄື່ອງຈັກ, ຫຼັງຈາກການກັ່ນຕອງດ້ວຍແຜ່ນຕ່ອງໂສ້ເຄື່ອງຖອດຊິບອັດຕະໂນມັດ (ການກັ່ນຕອງຫຍາບ) → ການກັ່ນຕອງນ້ໍາມັນລະດັບທໍາອິດ→ການກັ່ນຕອງນ້ໍາມັນລະດັບທີສອງແລະການຕອງລະດັບທີສາມຫຼັງຈາກການຕົກຕະກອນແລະ ການກັ່ນຕອງ.ແຜ່ນເຫຼັກແມ່ນຖືກສົ່ງໄປຫາລົດເກັບຮັກສາຊິບໂດຍລະບົບຕ່ອງໂສ້ chip conveyor, coolant ໄຫຼກັບຄືນໄປບ່ອນ tank ນ້ໍາມັນ, ແລະຫຼັງຈາກນັ້ນ coolant ໄດ້ຖືກສະຫນອງໃຫ້ແກ່ເຄື່ອງຮັບນ້ໍາມັນໂດຍຜ່ານສະຖານີປ້ຳຄວາມເຢັນ, ແລະນໍ້າມັນໄດ້ຖືກສະຫນອງໂດຍ 3 ຊຸດ. ຂອງ vane pumps ເພື່ອຕອບສະຫນອງຄວາມຕ້ອງການທີ່ແຕກຕ່າງກັນຂອງຂະຫນາດຂຸມ workpiece ໄດ້.
ໃນເວລາທີ່ເຄື່ອງຈັກໃນຂຸມພາຍໃນຂອງ workpiece ໄດ້, shaft ຕົ້ນຕໍຂອງປ່ອງແຖບເຈາະໄດ້ຂັບລົດເຄື່ອງມືທີ່ຈະ rotate, ແລະ chip ທາດເຫຼັກໄດ້ຖືກປະຕິບັດໄປຂ້າງຫນ້າໂດຍ coolant ແລະ discharged ໂດຍຜ່ານຮູພາຍໃນຂອງອຸປະກອນການກັບຄືນນ້ໍາມັນ.ເຄື່ອງຖອດຊິບອັດຕະໂນມັດຈະສົ່ງແຜ່ນເຫຼັກໄປໃສ່ລົດເກັບຮັກສາຊິບ, ແລະເຄື່ອງເຮັດຄວາມເຢັນໄດ້ຖືກເກັບກຳແລະນຳໃຊ້ຄືນໃໝ່.
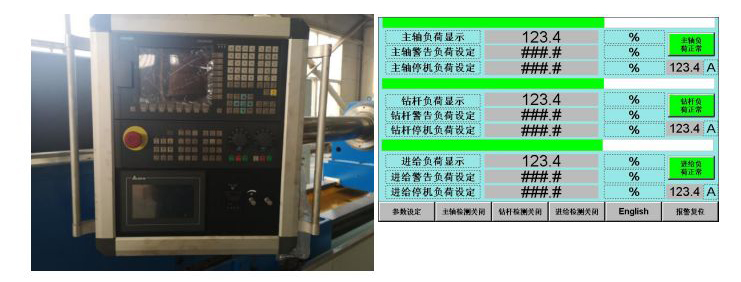
9. ການດໍາເນີນງານຂອງເຄື່ອງຈັກ
ແຜງຄວບຄຸມການເຮັດວຽກຂອງເຄື່ອງມືເຄື່ອງຈັກໄດ້ຖືກຕິດຕັ້ງຢູ່ເທິງບ່ອນນັ່ງກົດແລະຖືກສ້ອມແຊມໃສ່ລົດບັນທຸກບ່ອນນັ່ງກົດ, ເຊິ່ງສະດວກສໍາລັບການດໍາເນີນງານຂອງເຄື່ອງຈັກ.ກະດານແມ່ນເຮັດດ້ວຍເຫຼັກສະແຕນເລດ matt brushed, ຮູບຮ່າງແມ່ນການປະສານງານໂດຍລວມ, ງາມແລະທົນທານ.
ຊອບແວເຄື່ອງຈັກໄດ້ຖືກອອກແບບໃນ Siemens ແລະນໍາໃຊ້ສໍາລັບເວລາຫຼາຍປີ.ພວກເຮົາຮັກສາຄວາມກ້າວຫນ້າໃນລະດັບໂລກ.
10.ລະບົບໄຟຟ້າ
ມັນປະກອບດ້ວຍກ່ອງຄວບຄຸມຕົ້ນຕໍ, ກ່ອງປະຕິບັດການ, ກ່ອງເຊື່ອມຕໍ່ແລະສາຍເຄເບີ້ນ.ອົງປະກອບໄຟຟ້າຕົ້ນຕໍແມ່ນຍີ່ຫໍ້ Schneider.ສໍາລັບກ່ອງຄວບຄຸມໄຟຟ້າ (ເຄື່ອງປັບອາກາດເຢັນ).ພາກສ່ວນສາຍໄຟຕົ້ນຕໍຮັບຮອງເອົາໂຄງສ້າງ plug ການບິນ.ສາຍເຄເບີ້ນຮັບຮອງເອົາມາດຕະຖານແຫ່ງຊາດ, ແລະສາຍໄຟໃນປະຈຸບັນທີ່ອ່ອນແອແມ່ນໃຊ້ສາຍເຄເບີນທີ່ມີການປ້ອງກັນ.ສາຍໄຟໄດ້ຖືກຈັດລຽງຕາມຄວາມເຂັ້ມງວດຂອງການແຍກໄຟຟ້າທີ່ເຂັ້ມແຂງແລະອ່ອນແອ.

| NO | ລາຍການ | ຍີ່ຫໍ້ | NO | ລາຍການ | ຍີ່ຫໍ້ |
| 1 | ຮ່າງກາຍໂລຫະເຄື່ອງ | ເຮດດ້ວຍຕົນເອງ | 2 | ປ່ອງຂັບແຖບເບື່ອ | ເຮດດ້ວຍຕົນເອງ |
| 3 | ກະດານສະຫນັບສະຫນູນ | ເຮດດ້ວຍຕົນເອງ | 4 | Spindle bearing | ຍີ່ປຸ່ນ NSK |
| 5 | ຫມີສວນ່ອື່ນໆ | ຍີ່ຫໍ້ທີ່ດີ | 6 | ບານສະກູ | ຍີ່ຫໍ້ໄຕ້ຫວັນ |
| 7 | ອົງປະກອບໄຟຟ້າຕົ້ນຕໍ | schneider ຫຼື siemens | 8 | ມໍເຕີ spindle | ຍີ່ຫໍ້ຈີນ |
| 9 | Feed servo motor | Siemens | 10 | Feed servo driver | Siemens |
| 11 | ລະບົບ CNC | Siemens | 12 | ອົງປະກອບນິວເມຕິກ | SMC ຍີ່ປຸ່ນ |
10.CNC ລະບົບການຄວບຄຸມ
ເຄື່ອງມືເຄື່ອງຈັກໄດ້ຖືກຕິດຕັ້ງດ້ວຍລະບົບ SIMENS828D CNC, ແລະຄວາມດັນຂອງເຄື່ອງເຮັດຄວາມເຢັນແມ່ນສະແດງໂດຍເຄື່ອງມື.ມໍເຕີອາຫານແມ່ນມໍເຕີ servo, ແລະມໍເຕີປ່ອງປ່ອງທີ່ຫນ້າເບື່ອຖືກນໍາເຂົ້າ.ອາຫານຄູ່ມື, ຫນ້າທີ່ການວິນິດໄສຕົນເອງ.ການສະແດງສະຖານະ,
ຟັງຊັນຕ່າງໆເຊັ່ນ: ການສະແດງຕໍາແຫນ່ງໃນປະຈຸບັນ, ການສະແດງໂປຼແກຼມ, ການສະແດງການຕັ້ງຄ່າພາລາມິເຕີ, ຈໍສະແດງຜົນເຕືອນ, ການປ່ຽນຈໍສະແດງຜົນຫຼາຍພາສາ, ແລະອື່ນໆ. ດ້ວຍການໂຕ້ຕອບ RS232 / USB, ມັນສາມາດຖືກດໍາເນີນໂຄງການຢູ່ນອກເຄື່ອງ.ມາພ້ອມກັບອິນເຕີເຟດຂອງໂປລແກລມ input ແລະ output, ເຊິ່ງສາມາດຖືກ dumped ແລະເກັບໄວ້ໃນຄອມພິວເຕີ.ຕັ້ງຄ່າແຜງຄວບຄຸມຕົ້ນຕໍແລະສະຖານີປຸ່ມປະຕິບັດງານ, ການໂຕ້ຕອບການດໍາເນີນງານຂອງຈີນແລະສະຫຼັບການດໍາເນີນງານ, ປຸ່ມ, ແລະອື່ນໆ ການໂຕ້ຕອບຂອງເຄື່ອງຈັກໃນການຄວບຄຸມຕົ້ນຕໍແມ່ນໃຊ້ເພື່ອຕິດຕາມສະຖານະຂອງອຸປະກອນ, ການສະແດງຂໍ້ບົກພ່ອງແລະຂໍ້ມູນການຄຸ້ມຄອງອື່ນໆ.ດ້ວຍການວິນິດໄສຕົນເອງ, ຫນ້າທີ່ປ້ອງກັນຕົນເອງ, ພ້ອມກັບຈໍ LCD.
ນອກຈາກນັ້ນ, ມີການຕິດຕັ້ງໂມດູນປ້ອງກັນເຄື່ອງມືແຍກຕ່າງຫາກ: Taiwan Delta PLC + ຫນ້າຈໍສໍາຜັດ man-machine dialogue ແມ່ນໃຊ້ເພື່ອຕິດຕາມສະຖານະການເຮັດວຽກຂອງເຄື່ອງມືໃນເວລາຈິງ.ໃນເວລາທີ່ເຄື່ອງມືແລ່ນເກີນຄ່າ preset ຂອງສະພາບປົກກະຕິລ່ວງຫນ້າ, ການປົກປັກຮັກສາເຄື່ອງມືເຄື່ອງມືເຄື່ອງມືຈະປຸກໃນສອງຂັ້ນຕອນການກະຕຸ້ນຫຼືຢຸດອັດຕະໂນມັດ, ແລະ intuitively ສາມາດສັງເກດເບິ່ງສະຖານະການແລ່ນຂອງພາກສ່ວນເຄື່ອນຍ້າຍຂອງເຄື່ອງມືເຄື່ອງມື, ຊຶ່ງເປັນປະໂຫຍດກັບ. ການປົກປ້ອງຄວາມເສຍຫາຍຂອງເຄື່ອງມືແລະຄວາມປອດໄພຂອງການປຸງແຕ່ງ workpiece.ການຕັ້ງຄ່າພາລາມິເຕີແມ່ນງ່າຍດາຍ, intuitive, ສະດວກແລະເຊື່ອຖືໄດ້.ໂມດູນຫນ້າທີ່ປ້ອງກັນເຄື່ອງມື PLC ຖືກເພີ່ມເພື່ອຫຼີກເວັ້ນການປະກົດການ "locking ເຄື່ອງມື".